Deep Geometric Learning
To identify and fit geometric primitives (e.g., planes, spheres, cylinders, cones) in a noisy point cloud is a challenging yet beneficial task for fields such as robotics and reverse engineering. As a multi-model multi-instance fitting problem, it has been tackled with different approaches including RANSAC, which however often fit inferior models in practice with noisy inputs of cluttered scenes. Inspired by the corresponding human recognition process, and benefiting from the recent advancements in image semantic segmentation using deep neural networks, we propose BAGSFit as a new framework addressing this problem. Firstly, through a fully convolutional neural network, the input point cloud is point-wisely segmented into multiple classes divided by jointly detected instance boundaries without any geometric fitting. Thus, segments can serve as primitive hypotheses with a probability estimation of associating primitive classes. Finally, all hypotheses are sent through a geometric verification to correct any misclassification by fitting primitives respectively. We performed training using simulated range images and tested it with both simulated and real-world point clouds.
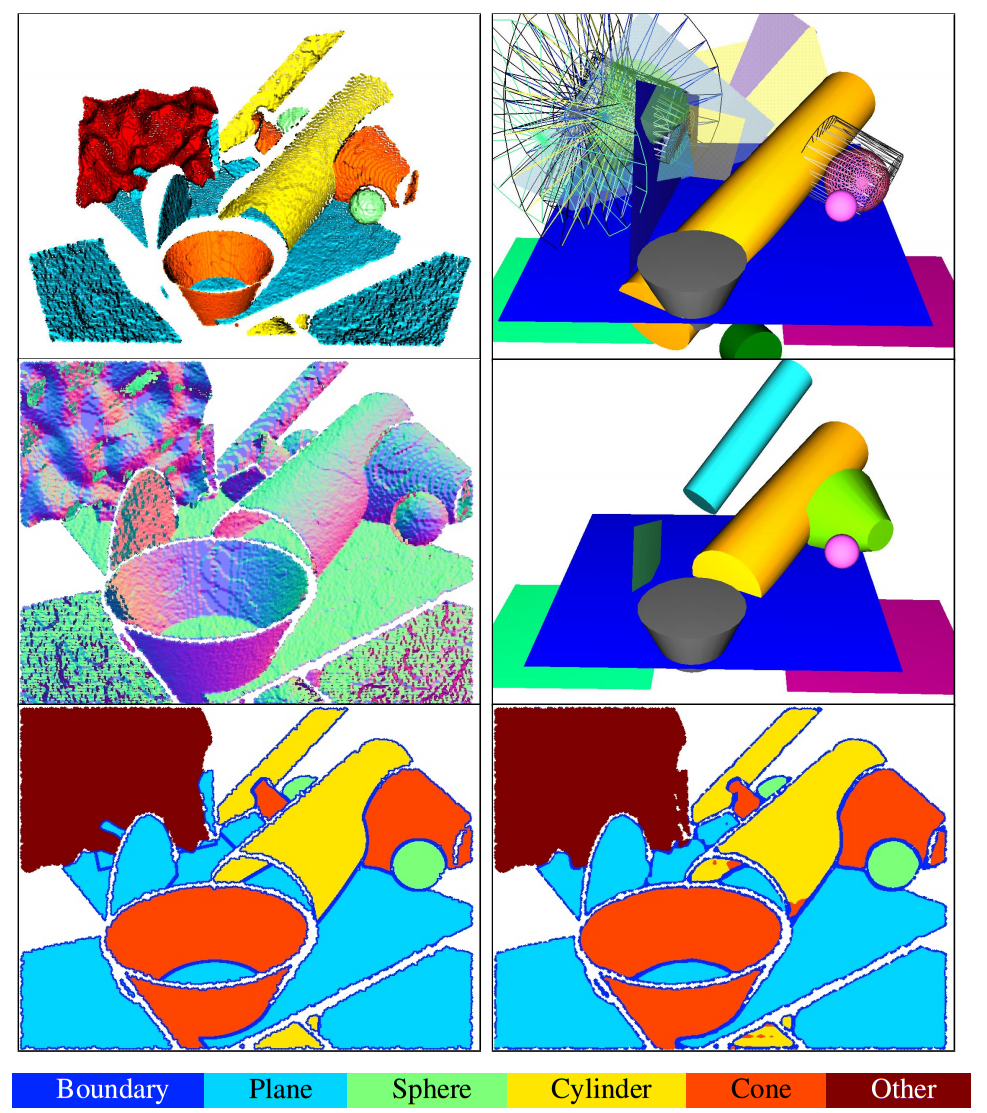
Primitive fitting on a simulated test range image (top left) with BAGSFit (middle right) vs. RANSAC (top right). Estimated normals (middle left) and ground truth labels (bottom left) are used to train a fully convolutional segmentation network in BAGSFit. During testing, a boundaryaware and thus instance-aware segmentation (bottom right) is predicted, and sent through a geometric verification to fit final primitives (randomly colored). Comparing with BAGSFit, the RANSAC-based method produces more misses and false detections of primitives (shown as transparent or wireframe), and thus a less appealing visual result.