Deep Geometric Learning
This project aims to obtain the parametric model of basic primitives from noisy point cloud.
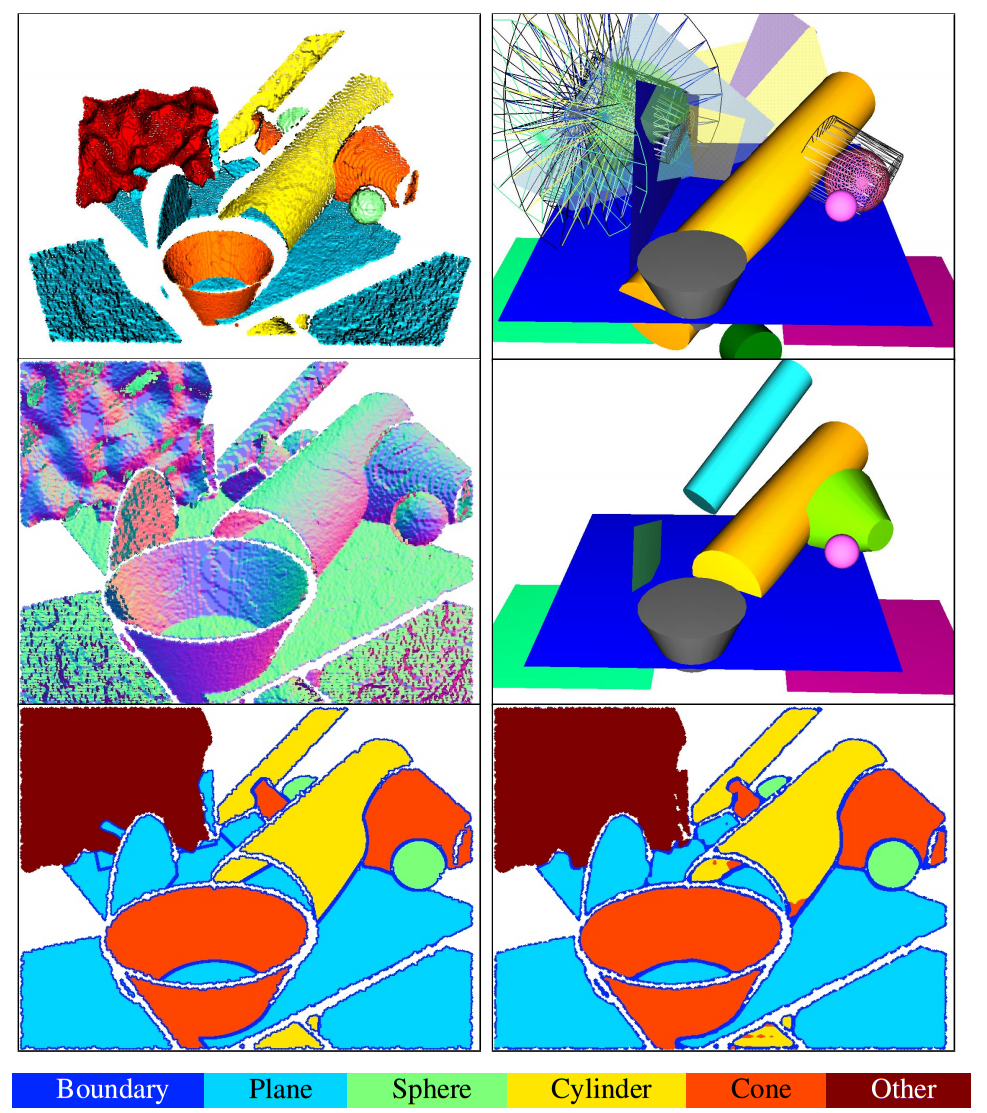
Primitive fitting on a simulated test range image (top left) with BAGSFit (middle right) vs. RANSAC (top right). Estimated normals (middle left) and ground truth labels (bottom left) are used to train a fully convolutional segmentation network in BAGSFit. During testing, a boundaryaware and thus instance-aware segmentation (bottom right) is predicted, and sent through a geometric verification to fit final primitives (randomly colored). Comparing with BAGSFit, the RANSAC-based method produces more misses and false detections of primitives (shown as transparent or wireframe), and thus a less appealing visual result.

